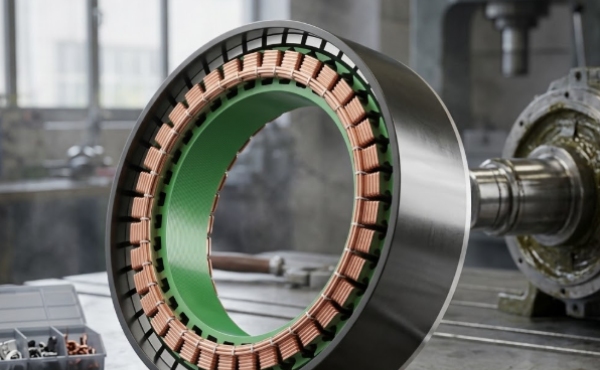
การผลักดันทั่วโลกไปสู่ระบบอัตโนมัติทางอุตสาหกรรมขั้นสูง หุ่นยนต์ร่วมปฏิบัติงานที่มีน้ำหนักบรรทุกสูง (โคบอท) แขนทางการแพทย์ที่ใช้ในการผ่าตัด และระบบป้องกันแบบหลายแกน ทำให้แอคชูเอเตอร์ระบบเครื่องกลไฟฟ้ามีความต้องการอย่างมาก เซอร์โวมอเตอร์แบบบรรจุหีบห่อแบบดั้งเดิมมักจะเพิ่มมวลมากเกินไป น้ำหนักส่วนเกิน และความสอดคล้องทางกลไกในการออกแบบข้อต่อ เพื่อให้เกิดการเคลื่อนไหวที่ลื่นไหลและแรงบิดสูงภายในพื้นที่จำกัด วิศวกรด้านการออกแบบสมัยใหม่ จึงหันมาใช้มอเตอร์ข้อต่อแรงบิดแบบไร้กรอบ ในตัว
ด้วยการฝังสเตเตอร์และโรเตอร์ลงในโครงโครงสร้างของเครื่องจักรโดยตรง ชุดอุปกรณ์ที่ผสานรวมเหล่านี้จึงขจัดเพลา แบริ่ง และข้อต่อที่ไม่จำเป็นออกไป อย่างไรก็ตาม การบรรลุความแม่นยำอย่างแท้จริงในข้อต่อขนาดกะทัดรัดนั้นต้องการมากกว่าแค่การบูรณาการขั้นพื้นฐาน มันต้องการการปรับจูนด้วยแม่เหล็กขั้นสูง กลไกป้อนกลับที่แม่นยำ และการเชื่อมต่อระบบที่คล่องตัว
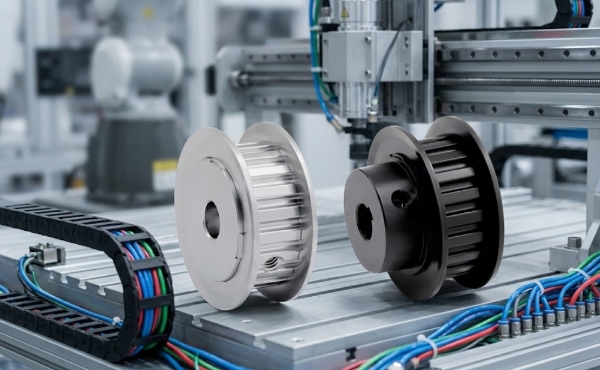
💡 การออกแบบแม่เหล็กขั้นสูง: เพิ่มความหนาแน่นของแรงบิดสูงสุดในขณะที่ลดการ Cogging
ในการควบคุมการเคลื่อนไหวที่แม่นยำ ประสิทธิภาพของมอเตอร์มักถูกจำกัดด้วยขอบเขตความร้อนและแรงเสียดทานทางแม่เหล็กโดยธรรมชาติ มอเตอร์ไร้กรอบมาตรฐานมักประสบกับแรงบิดฟันเฟืองที่รุนแรง—การดึงแม่เหล็กเป็นระยะระหว่างแม่เหล็กโรเตอร์และช่องสเตเตอร์—ซึ่งทำให้ความแม่นยำในการวางตำแหน่งลดลงที่ความเร็วต่ำ
เพื่อแก้ไขข้อจำกัดเหล่านี้ ข้อต่อหุ่นยนต์ที่ล้ำสมัยจึงใช้การออกแบบช่องมอเตอร์ที่ได้รับการปรับปรุงให้เหมาะสม ด้วยการคำนวณความเบ้ทางเรขาคณิตที่แม่นยำของช่องสเตเตอร์หรือการเปลี่ยนรูปแบบแม่เหล็กถาวรบนโรเตอร์ วิศวกรสามารถลดผลกระทบจากฟันเฟืองได้อย่างมาก การออกแบบนี้ให้แรงบิดความหนาแน่นสูงอย่างน่าทึ่ง ช่วยให้มั่นใจได้ถึงแรงบิดสูงสุดต่อหน่วยปริมาตร ในขณะที่ยังคงการหมุนที่ราบรื่น
● ความเป็นเลิศในการควบคุมความเร็วต่ำ:ด้วยสถาปัตยกรรมแม่เหล็กที่ได้รับการปรับปรุงนี้ ระบบจึงรักษาการควบคุมที่แม่นยำที่ความเร็วต่ำ ช่วยขจัดปัญหาการลื่นไถลที่พบบ่อยในการกำหนดค่าไดรฟ์ตรงระดับล่าง ซึ่งเป็นสิ่งสำคัญสำหรับการเชื่อมที่มีความแม่นยำสูง การประกอบขนาดเล็ก และการใช้งานในการผ่าตัดที่ละเอียดอ่อน
● การสั่นสะเทือนต่ำและการทำงานเงียบ:การปรับโครงสร้างนี้ช่วยให้มั่นใจได้ถึงการตอบสนองที่รวดเร็ว การทำงานที่เสถียร การสั่นสะเทือนต่ำ และเสียงรบกวนต่ำ การขจัดเสียงสะท้อนความถี่สูงมีความสำคัญอย่างยิ่งสำหรับห้องผ่าตัดทางการแพทย์และพื้นที่ทำงานในห้องปลอดเชื้อที่ทำงานร่วมกัน
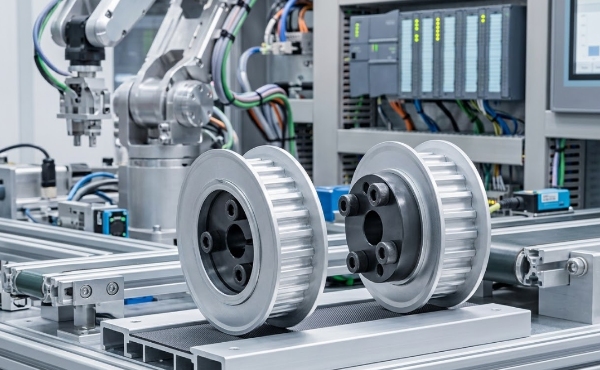
🛠️ จลนศาสตร์เครื่องกล: การรวมตัวลดดาวเคราะห์ที่มีความแม่นยำสูง
ชุดมอเตอร์แบบไร้กรอบให้แรงบิดแม่เหล็กไฟฟ้า แต่การแปลงกำลังนั้นให้เป็นข้อต่อหุ่นยนต์ที่ใช้งานได้นั้นจำเป็นต้องมีระบบลดความเร็วที่มีประสิทธิภาพสูง การรวมตัวลดเกียร์ดาวเคราะห์ที่มีความแม่นยำสูงเข้ากับโปรไฟล์เฟืองเกลียวขั้นสูงทำให้เกิดโซลูชันที่มีขนาดกะทัดรัดและทนทานสูง
การปรับเทียบระยะฟันเฟืองต่ำพิเศษ:กล่องเกียร์มาตรฐานเชิงพาณิชย์ทำให้เกิดระยะฟันเฟืองที่สำคัญ ซึ่งทำลายความสามารถในการทำซ้ำตำแหน่ง ข้อต่อแบบบูรณาการระดับพรีเมียมมีลักษณะความกลมของรากฟันน้อยกว่า 3 อาร์คนาที ความทนทานต่อรูปทรงเรขาคณิตที่แคบนี้รับประกันความแข็งแกร่งของแรงบิดที่โดดเด่น และลดการเคลื่อนไหวที่สูญเสียไปในระหว่างรอบสองทิศทาง
การกลับทิศทางอย่างรวดเร็ว:ความเฉื่อยต่ำของโรเตอร์ไร้กรอบ จับคู่กับความพอดีของเฟืองเฮลิคอลแพลเน็ตทารี ช่วยให้สามารถกลับทิศทางของมอเตอร์ได้อย่างรวดเร็ว แอคชูเอเตอร์สามารถหมุนได้ทันทีภายใต้ภาระหนัก โดยไม่เกิดแรงกระแทกทางกลหรือทำให้ระบบขับเคลื่อนตึง


🏢 ระบบอัจฉริยะแบบ Closed-Loop: มาตรฐานการดำเนินการกลุ่ม iHF
สำหรับผู้สร้างหุ่นยนต์อุตสาหกรรมและผู้วางระบบอัตโนมัติ การประกอบสเตเตอร์ โรเตอร์ เกียร์สเตรนเวฟ และเครื่องเข้ารหัสจากผู้จำหน่ายที่แตกต่างกัน ทำให้เกิดปัญหาคอขวดในการผลิตที่น่าหงุดหงิด ความไม่เข้ากันระหว่างส่วนประกอบมักนำไปสู่ความล่าช้าของสัญญาณ ปัญหาการขยายตัวเนื่องจากความร้อน และขั้นตอนการสอบเทียบที่ซับซ้อน
เพื่อแก้ปัญหาความท้าทายในอุตสาหกรรมเหล่านี้ iHF Group ได้ออกแบบโซลูชันข้อต่อแบบแยกส่วนประสิทธิภาพสูงแบบครบวงจร ด้วยการจับคู่เทคโนโลยีไดเร็กไดรฟ์ที่มีความแม่นยำเข้ากับฮาร์ดแวร์ป้อนกลับขั้นสูง ระบบ iHF Group จึงมอบประสิทธิภาพไดเร็กไดรฟ์ที่ไม่มีใครเทียบได้ทันทีตั้งแต่แกะกล่อง
⚙️ การควบคุมวงปิดหลายตัวแปรอย่างแท้จริง:ตัวควบคุม iHF Group บรรลุการควบคุมแรงบิด ความเร็ว และตำแหน่งวงปิดที่กำหนดได้อย่างสมบูรณ์และกำหนดได้ อัลกอริธึมการควบคุมเชิงสนามขั้นสูง (FOC) ประมวลผลโปรไฟล์ปัจจุบันแบบเรียลไทม์ ป้องกันข้อผิดพลาดในการติดตามแม้ในระหว่างการเคลื่อนไหวที่มีไดนามิกสูง
📊 สถาปัตยกรรมป้อนกลับของตัวเข้ารหัสคู่:เพื่อกำจัดข้อผิดพลาดในการกำหนดตำแหน่งที่เกิดจากการโก่งตัวของเกียร์ทางกายภาพภายใต้ภาระหนัก ระบบจึงรองรับตัวเข้ารหัสคู่เพื่อเพิ่มความแม่นยำในการควบคุมป้อนกลับเพิ่มเติม ตัวเข้ารหัสสัมบูรณ์หรือส่วนเพิ่มที่มีความละเอียดสูงจะตรวจสอบเพลามอเตอร์ความเร็วสูง ในขณะที่ตัวเข้ารหัสสัมบูรณ์รองจะตรวจสอบข้อต่อเอาต์พุตความเร็วต่ำโดยตรง การตั้งค่านี้จะวัดและแก้ไขการโก่งตัวเล็กน้อยเล็กน้อยแบบเรียลไทม์อย่างต่อเนื่อง


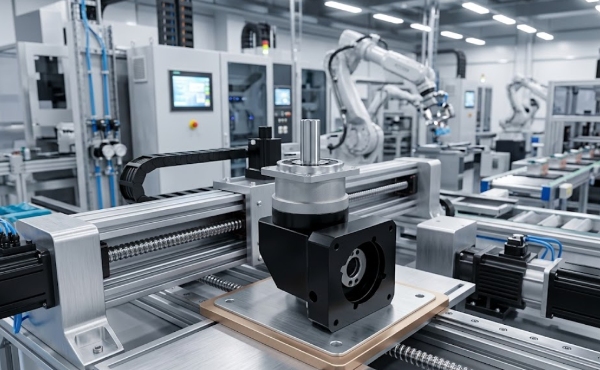
🔌 ปรับภูมิทัศน์ของระบบให้เพรียวลม: สถาปัตยกรรมแบบเดซี่เชน
เนื่องจากระบบหุ่นยนต์เพิ่มแกนมากขึ้น เช่น โคบอท 7 แกนหรือโครงสร้างคล้ายมนุษย์ที่ซับซ้อน การจัดการเครื่องทอสายไฟภายในจึงมีความซับซ้อนสูง การใช้สายไฟและสายไฟป้อนกลับเฉพาะจากตู้ควบคุมกลางผ่านข้อต่อทุกจุดนำไปสู่การมัดสายเคเบิลหนาที่จำกัดการเคลื่อนไหวของข้อต่อ และเพิ่มความเสี่ยงต่อความล้มเหลวจากการบิดอย่างต่อเนื่อง
ข้อต่อที่มีความหนาแน่นสูงสมัยใหม่สามารถเอาชนะสิ่งนี้ได้ด้วยการผสมผสานรูปแบบการสื่อสารแบบอนุกรมที่ประหยัดพื้นที่ ระบบรองรับการกำหนดค่าแบบเดซี่เชนสำหรับหลายยูนิต อำนวยความสะดวกในการจ่ายไฟและการรับส่งข้อมูล ด้วยการฝังไมโครไดรฟ์ที่แปลเป็นภาษาท้องถิ่นไว้ภายในข้อต่อแต่ละข้อ ทำให้บัสจ่ายไฟ DC ที่ใช้ร่วมกันเพียงเส้นเดียวและสายอีเธอร์เน็ตอุตสาหกรรมความเร็วสูง (เช่น EtherCAT หรือ CANopen) สามารถกำหนดเส้นทางตามลำดับจากข้อต่อหนึ่งไปยังอีกข้อต่อหนึ่งได้ สิ่งนี้ช่วยลดน้ำหนักสายเคเบิลทั้งหมดลงอย่างมาก ลดความซับซ้อนในการกำหนดเส้นทางทางกายภาพ และเพิ่มความน่าเชื่อถือของระบบโดยรวม
❓ เจาะลึกทางเทคนิค: ถาม-ตอบในอุตสาหกรรม
คำถามที่ 1: การตั้งค่าตัวเข้ารหัสคู่ป้องกันการสึกหรอทางกลเมื่อเวลาผ่านไปได้อย่างไร
ตอบ: ในระบบตัวเข้ารหัสเดี่ยว หากเฟืองดาวเคราะห์มีการสึกหรอเล็กน้อยหรือมีฟันเฟืองเล็กน้อยตลอดอายุการใช้งาน ตัวควบคุมจะไม่ทราบถึงข้อผิดพลาดทางกายภาพที่หน้าแปลนเอาท์พุต ด้วยการใช้การสนับสนุนตัวเข้ารหัสคู่ที่ iHF Group มอบให้ ตัวเข้ารหัสรองจะตรวจสอบตำแหน่งเครื่องมือจริงโดยตรง แม้ว่าการสึกหรอทางกลจะเกิดขึ้นภายในตัวลด ระบบวงปิดจะชดเชยความแปรปรวนโดยอัตโนมัติ เพื่อให้มั่นใจว่าหุ่นยนต์ของคุณจะรักษาความแม่นยำระดับต่ำกว่ามิลลิเมตรตลอดอายุการใช้งาน
คำถามที่ 2: เหตุใดจึงเลือกใช้เฟืองเฮลิคอลมากกว่าเฟืองตรงในการใช้งานข้อต่อที่มีแรงบิดสูง
ตอบ: เฟืองเฮลิคอลมีลักษณะเป็นแนวฟันที่ทำมุมซึ่งจะค่อยๆ เคลื่อนตัวแทนที่จะเคลื่อนทั้งหมดในคราวเดียว หน้าสัมผัสฟันแบบโปรเกรสซีฟนี้จะเพิ่มอัตราส่วนหน้าสัมผัสทั้งหมดอย่างมีนัยสำคัญ โดยกระจายแรงทางกลสูงไปยังฟันหลายซี่ รูปแบบนี้ช่วยให้รากฟันมีความกลมได้โดยตรงน้อยกว่า 3 อาร์คนาที ลดเสียงรบกวน และให้แรงบิดที่เหนือกว่าซึ่งจำเป็นสำหรับแรงบิดที่พุ่งขึ้นอย่างกะทันหัน

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar ขอใบเสนอราคา
ขอใบเสนอราคา