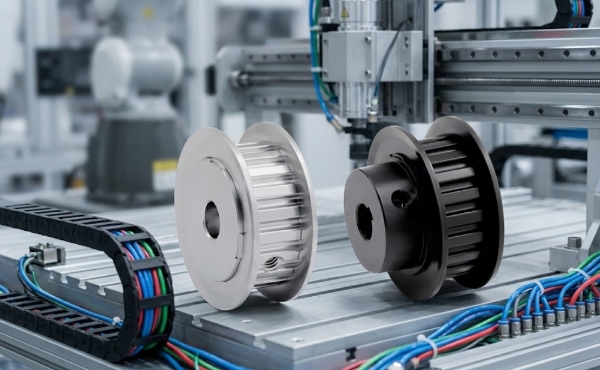
วิวัฒนาการของวิทยาการหุ่นยนต์ขั้นสูง ตั้งแต่หุ่นยนต์ร่วมปฏิบัติงาน (โคบอท) และข้อต่อทางอุตสาหกรรม ไปจนถึงระบบสองเท้าคล้ายมนุษย์ ต้องการความหนาแน่นของพลังงานในระดับที่ไม่เคยมีมาก่อน ความแข็งแกร่งของแรงบิด และความเที่ยงตรงของตำแหน่ง หัวใจของการเคลื่อนไหวทุกรูปแบบอยู่ที่โมดูลแอคชูเอเตอร์ เพื่อให้เป็นไปตามข้อจำกัดทางกลที่เข้มงวดเหล่านี้ สถาปัตยกรรมระบบอัตโนมัติสมัยใหม่จึงจำเป็นต้องมีกระปุกเกียร์มอเตอร์ข้อต่อหุ่นยนต์ ที่มีการผสานรวมในระดับสูง ซึ่งรวมประสิทธิภาพทางแม่เหล็กไฟฟ้าเป็นหนึ่งเดียวพร้อมการลดกลไกทางกลเป็นศูนย์
ในฐานะผู้บุกเบิกชั้นนำด้านโซลูชันการส่งผ่านและการควบคุมการเคลื่อนไหวทางอุตสาหกรรม iHF Group ได้ออกแบบโมดูลเซอร์โวแอคชูเอเตอร์แบบบูรณาการที่ล้ำสมัย ด้วยการรวมมอเตอร์แม่เหล็กถาวรแรงบิดฟันเฟืองต่ำพิเศษเข้ากับตัวลดเกียร์ดาวเคราะห์ที่มีความแม่นยำสูง iHF Group มอบรากฐานทางกลที่จำเป็นสำหรับระบบหุ่นยนต์ยุคต่อไป
⚙️1. กล่องเกียร์มอเตอร์ข้อต่อหุ่นยนต์คืออะไร?
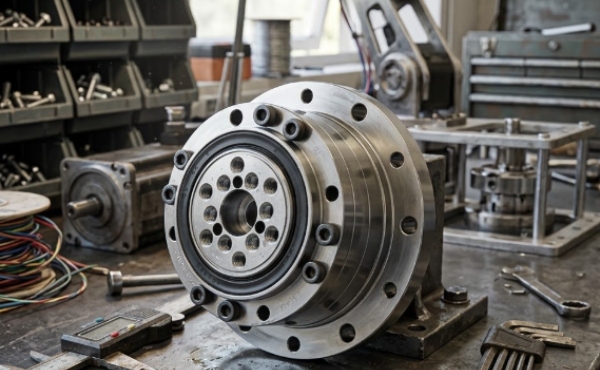
Robot Joint Motor Gearbox เป็นระบบเครื่องกลไฟฟ้าแบบบูรณาการที่ใช้ในข้อต่อหุ่นยนต์เพื่อแปลงเอาต์พุตความเร็วสูงและแรงบิดต่ำของมอเตอร์ให้เป็นการเคลื่อนที่ด้วยความเร็วต่ำและแรงบิดสูงพร้อมการควบคุมที่แม่นยำ โดยทั่วไปแล้วจะรวมเซอร์โวหรือมอเตอร์ไร้แปรงถ่าน กระปุกเกียร์ที่มีความแม่นยำ (มักเป็นชุดลดเกียร์แบบดาวเคราะห์หรือแบบเกลียว) และระบบป้อนกลับ เช่น ตัวเข้ารหัส เพื่อให้เกิดการควบคุมแรงบิด ความเร็ว และตำแหน่งแบบวงปิด ช่วยให้ข้อต่อหุ่นยนต์สามารถรักษาการทำงานที่ความเร็วต่ำได้อย่างเสถียร การกลับทิศทางอย่างรวดเร็ว ความหนาแน่นของแรงบิดสูง การสั่นสะเทือนต่ำ และประสิทธิภาพเสียงรบกวนต่ำ การออกแบบขั้นสูงยังปรับโครงสร้างช่องมอเตอร์ให้เหมาะสมเพื่อประสิทธิภาพแรงบิดที่ดีขึ้น ลดแรงบิดของฟันเฟืองเพื่อการเคลื่อนไหวที่ราบรื่นยิ่งขึ้น และอาจรวมตัวเข้ารหัสคู่เพื่อความแม่นยำที่เพิ่มขึ้น ในการกำหนดค่าระดับไฮเอนด์ สามารถเชื่อมต่อหลายยูนิตผ่านการสื่อสารแบบเดซี่เชน เพื่อลดความซับซ้อนในการส่งกำลังและข้อมูลในระบบหุ่นยนต์หลายแกน โดยรวมแล้ว มันเป็นองค์ประกอบหลักที่ช่วยให้สามารถเคลื่อนที่ได้อย่างแม่นยำในหุ่นยนต์อุตสาหกรรม หุ่นยนต์ร่วมปฏิบัติงาน และระบบการเคลื่อนไหวอัตโนมัติ


🔩 2. สถาปัตยกรรมการทำงานหลักของกระปุกเกียร์มอเตอร์ข้อต่อหุ่นยนต์
ระบบกระปุกเกียร์มอเตอร์ข้อต่อหุ่นยนต์ผสานรวมเทคโนโลยีขับเคลื่อนมอเตอร์เข้ากับกลไกการลดขนาดที่มีความแม่นยำสูง ทำให้สามารถควบคุมการเคลื่อนไหวในข้อต่อหุ่นยนต์ได้
หน้าที่หลักได้แก่:
● การขยายแรงบิด
● การลดความเร็วและความเสถียร
● การควบคุมตำแหน่งที่แม่นยำ
● การเปลี่ยนทิศทางที่ราบรื่น
ช่วยให้หุ่นยนต์สามารถเคลื่อนไหวที่ซับซ้อนได้อย่างแม่นยำและทำซ้ำได้สูง
🎯 3. ข้อได้เปรียบด้านประสิทธิภาพที่สำคัญ
⚡ 3.1 การควบคุมความแม่นยำความเร็วต่ำ
ข้อกำหนดที่สำคัญที่สุดอย่างหนึ่งในวิทยาการหุ่นยนต์คือการทำงานที่เสถียรที่ความเร็วต่ำ ระบบจะรักษา:
● แรงบิดที่สม่ำเสมอ
● ความแม่นยำในการเคลื่อนที่ระดับไมโคร
● พฤติกรรมการหมุนที่ราบรื่น
นี่เป็นสิ่งจำเป็นสำหรับงานต่างๆ เช่น การประกอบ การเชื่อม และหุ่นยนต์ผ่าตัด
🔄 3.2 ความสามารถในการกลับทิศทางอย่างรวดเร็ว
กระปุกเกียร์ช่วยให้มอเตอร์ตอบสนองได้อย่างรวดเร็วระหว่างการเปลี่ยนทิศทาง ซึ่งปรับปรุง:
● ประสิทธิภาพรอบเวลา
● ความยืดหยุ่นในการเคลื่อนไหว
● การตอบสนองแบบไดนามิกในแขนหุ่นยนต์
🔁 3.3 ระบบควบคุมแบบวงปิด
คุณสมบัติที่สำคัญของระบบข้อต่อหุ่นยนต์สมัยใหม่คือการควบคุมการตอบสนองแบบวงปิด ซึ่งช่วยให้:
● การควบคุมแรงบิด
● การควบคุมความเร็ว
● ตำแหน่งเชิงมุมที่แม่นยำ
ช่วยให้มั่นใจได้ว่าการเคลื่อนไหวของหุ่นยนต์ได้รับการแก้ไขอย่างต่อเนื่องแบบเรียลไทม์เพื่อความแม่นยำสูงสุด
🌊 3.4 การสั่นสะเทือนและเสียงรบกวนต่ำ
การออกแบบโครงสร้างที่ได้รับการปรับปรุงให้เหมาะสมจะช่วยลดความไม่แน่นอนทางกล ส่งผลให้:
● ลดความกว้างของการสั่นสะเทือน
● เอาต์พุตเสียงรบกวนต่ำ
● ประสิทธิภาพการทำงานที่ราบรื่นยิ่งขึ้น
นี่เป็นสิ่งสำคัญอย่างยิ่งสำหรับหุ่นยนต์ร่วมปฏิบัติงานที่ทำงานใกล้มนุษย์
🧠 4. คุณสมบัติการออกแบบทางวิศวกรรมขั้นสูง
🧩 4.1 การออกแบบสล็อตมอเตอร์ความหนาแน่นสูงแรงบิด
มอเตอร์ได้รับการออกแบบทางวิศวกรรมด้วยรูปทรงสล็อตที่ปรับให้เหมาะสม โดยปรับปรุง:
● ประสิทธิภาพทางแม่เหล็กไฟฟ้า
● เอาต์พุตความหนาแน่นของแรงบิด
● ลดแรงบิดจากฟันเฟือง
ช่วยให้มีสมรรถนะที่สูงขึ้นในโครงสร้างข้อต่อหุ่นยนต์ขนาดกะทัดรัด
⚙️ 4.2 ตัวลดเกียร์ดาวเคราะห์ที่มีความแม่นยำสูง
ที่แกนกลางของกระปุกเกียร์คือระบบเกียร์ดาวเคราะห์แบบขดลวดที่ออกแบบมาสำหรับ:
● ประสิทธิภาพการรับส่งข้อมูลสูง
● การแปลงแรงบิดที่มั่นคง
● ลดฟันเฟืองเชิงกล
ระบบนี้ทำให้ความกลมของรากฟันมีความแม่นยำน้อยกว่า 3 อาร์คนาที ทำให้มั่นใจในความแม่นยำของตำแหน่งที่ยอดเยี่ยมในการควบคุมการเคลื่อนไหวของหุ่นยนต์
🎛️ 4.3 ระบบป้อนกลับตัวเข้ารหัสคู่
การกำหนดค่าขั้นสูงรองรับตัวเข้ารหัสคู่ ซึ่งช่วยปรับปรุง:
● ความแม่นยำของตำแหน่ง
● ความละเอียดการตอบสนองแรงบิด
● ระบบซ้ำซ้อนและเสถียรภาพ
ช่วยให้สามารถเคลื่อนที่ของหุ่นยนต์ได้อย่างแม่นยำเป็นพิเศษในสภาพแวดล้อมอัตโนมัติระดับไฮเอนด์
🔗 4.4 สถาปัตยกรรมการสื่อสารแบบเดซี่เชน
ระบบรองรับการกำหนดค่าแบบเดซี่เชน ช่วยให้:
● สถาปัตยกรรมการเดินสายที่เรียบง่าย
● ลดความซับซ้อนในการติดตั้ง
● บูรณาการพลังงานและการถ่ายโอนข้อมูลผ่านข้อต่อหลาย ๆ
สิ่งนี้มีประโยชน์อย่างยิ่งในระบบหุ่นยนต์หลายแกนและแพลตฟอร์มหุ่นยนต์ฮิวแมนนอยด์
🏭 5. การใช้งานทางอุตสาหกรรมของระบบกระปุกเกียร์มอเตอร์ข้อต่อหุ่นยนต์
🤖 หุ่นยนต์อุตสาหกรรม
ใช้ในแขนหุ่นยนต์สำหรับการเชื่อม การประกอบ และการขนย้ายวัสดุ
🏥 หุ่นยนต์ทางการแพทย์
รองรับหุ่นยนต์ผ่าตัดที่ต้องการความแม่นยำในการเคลื่อนไหวสูงเป็นพิเศษ
🧑🤝🧑 หุ่นยนต์ร่วมปฏิบัติงาน (โคบอท)
ช่วยให้ปฏิสัมพันธ์ระหว่างมนุษย์กับหุ่นยนต์เป็นไปอย่างราบรื่นและปลอดภัย โดยมีเสียงรบกวนและการสั่นสะเทือนต่ำ
🚗 การผลิตยานยนต์
ใช้ในสายการประกอบที่มีความแม่นยำและระบบการผลิตอัตโนมัติ
📦 ระบบอัตโนมัติด้านลอจิสติกส์
รองรับระบบการคัดแยก การหยิบ และการบรรจุด้วยหุ่นยนต์

🏗️6. ความสำคัญทางวิศวกรรมของการเลือกกระปุกเกียร์
การเลือกกระปุกเกียร์มอเตอร์ข้อต่อหุ่นยนต์ที่เหมาะสมเป็นสิ่งสำคัญเนื่องจากจะส่งผลโดยตรงต่อ:
● ความแม่นยำในการเคลื่อนไหว
● ความสามารถในการรับน้ำหนัก
● ความเสถียรของระบบ
● อายุการใช้งาน
● ประสิทธิภาพการใช้พลังงาน
การออกแบบกระปุกเกียร์ที่ไม่ดีอาจส่งผลให้:
● ข้อผิดพลาดฟันเฟือง
● ร้อนเกินไป
● ความไม่มั่นคงในการสั่นสะเทือน
● ลดความแม่นยำของหุ่นยนต์
🏢 7. นวัตกรรมทางวิศวกรรมของกลุ่ม iHF ในระบบการเคลื่อนที่ของหุ่นยนต์
ในฐานะผู้ผลิตระบบการเคลื่อนที่และระบบส่งกำลังโดยเฉพาะ iHF Group พัฒนาโซลูชันกระปุกเกียร์มอเตอร์ข้อต่อหุ่นยนต์ประสิทธิภาพสูงที่ออกแบบมาสำหรับหุ่นยนต์สมัยใหม่
แนวทางทางวิศวกรรมของพวกเขามุ่งเน้นไปที่:
● การออกแบบเกียร์ดาวเคราะห์ที่มีประสิทธิภาพสูง
● บูรณาการมอเตอร์ที่มีความแม่นยำ
● อัตราส่วนแรงบิดต่อขนาดที่ปรับให้เหมาะสม
● สถาปัตยกรรมทางกลที่มีสัญญาณรบกวนต่ำ
● ความเข้ากันได้ของการควบคุมข้อเสนอแนะขั้นสูง
แทนที่จะนำเสนอส่วนประกอบทางกลทั่วไป iHF Group เน้นการปรับการเคลื่อนไหวในระดับระบบให้เหมาะสม เพื่อให้มั่นใจว่าสามารถบูรณาการเข้ากับแพลตฟอร์มหุ่นยนต์ขั้นสูงได้อย่างราบรื่น
🚀 8. แนวโน้มในอนาคตของเทคโนโลยีกระปุกเกียร์มอเตอร์ร่วมหุ่นยนต์
อุตสาหกรรมหุ่นยนต์กำลังพัฒนาอย่างรวดเร็ว โดยขับเคลื่อนนวัตกรรมในระบบกระปุกเกียร์:
● การชดเชยการเคลื่อนไหวที่ขับเคลื่อนด้วย AI
● การย่อขนาดความหนาแน่นของแรงบิดที่สูงขึ้น
● ระบบเกียร์ฟันเฟืองต่ำเป็นพิเศษ
● ตัวกระตุ้นอัจฉริยะแบบครบวงจร
● ปรับปรุงประสิทธิภาพการใช้พลังงานสำหรับหุ่นยนต์ฮิวแมนนอยด์
แนวโน้มเหล่านี้จะเป็นตัวกำหนดระบบการเคลื่อนที่ของหุ่นยนต์อัจฉริยะรุ่นต่อไป
🧾 9. คำถามที่พบบ่อย: Robot Joint Motor Gearbox
❓ อะไรทำให้กระปุกเกียร์มอเตอร์ข้อต่อหุ่นยนต์แตกต่างจากกระปุกเกียร์มาตรฐาน
มันรวมการควบคุมมอเตอร์และการลดความแม่นยำไว้ในระบบเดียวที่ปรับให้เหมาะสมเพื่อความแม่นยำในการเคลื่อนที่ของหุ่นยนต์
❓ เหตุใดการสั่นสะเทือนต่ำจึงมีความสำคัญในวิทยาการหุ่นยนต์
การสั่นสะเทือนต่ำช่วยให้มั่นใจได้ถึงความแม่นยำที่สูงขึ้น การเคลื่อนไหวที่ราบรื่นยิ่งขึ้น และปรับปรุงความปลอดภัยในการโต้ตอบระหว่างมนุษย์และหุ่นยนต์
❓ บทบาทของกระปุกเกียร์ดาวเคราะห์ในวิทยาการหุ่นยนต์คืออะไร?
ให้ความหนาแน่นของแรงบิดสูง โครงสร้างกะทัดรัด และการส่งผ่านการเคลื่อนไหวที่มั่นคงสำหรับข้อต่อหุ่นยนต์
❓ เหตุใดจึงต้องใช้ตัวเข้ารหัสคู่ในข้อต่อหุ่นยนต์
ตัวเข้ารหัสคู่ปรับปรุงความแม่นยำในการป้อนกลับ ความซ้ำซ้อน และความเสถียรในการควบคุมการเคลื่อนไหวแบบวงปิด
❓ อุตสาหกรรมใดที่ได้ประโยชน์มากที่สุดจากระบบเหล่านี้?
ระบบอัตโนมัติทางอุตสาหกรรม หุ่นยนต์ทางการแพทย์ ระบบโลจิสติกส์ การผลิตยานยนต์ และหุ่นยนต์ร่วมปฏิบัติงาน
🧾 บทสรุป: Precision Motion กำหนดอนาคตของวิทยาการหุ่นยนต์
กล่องเกียร์มอเตอร์ข้อต่อหุ่นยนต์เป็นส่วนประกอบพื้นฐานในวิทยาการหุ่นยนต์สมัยใหม่ ช่วยให้สามารถควบคุมการเคลื่อนไหวได้อย่างแม่นยำ เสถียร และชาญฉลาดในการใช้งานที่หลากหลาย
ด้วยคุณสมบัติทางวิศวกรรมขั้นสูง เช่น การควบคุมแบบวงปิด การป้อนกลับด้วยตัวเข้ารหัสคู่ ความแม่นยำของเกียร์ดาวเคราะห์ และการทำงานที่มีการสั่นสะเทือนต่ำ ระบบเหล่านี้จึงมีความจำเป็นสำหรับประสิทธิภาพของหุ่นยนต์รุ่นต่อไป
ด้วยนวัตกรรมที่ต่อเนื่อง iHF Group นำเสนอโซลูชันการเคลื่อนไหวที่มีความแม่นยำสูงซึ่งช่วยให้ผู้ผลิตหุ่นยนต์สามารถบรรลุประสิทธิภาพ ความแม่นยำ และความน่าเชื่อถือของระบบที่สูงขึ้นในสภาพแวดล้อมอัตโนมัติที่ซับซ้อนมากขึ้น

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar ขอใบเสนอราคา
ขอใบเสนอราคา