ในระบบหุ่นยนต์หลายแกน ความแม่นยำของตำแหน่ง ความสามารถในการทำซ้ำ และการตอบสนองไดนามิกของเอนด์เอฟเฟกต์ไม่ได้ถูกกำหนดโดยความซับซ้อนของอัลกอริธึมควบคุมเพียงอย่างเดียว โดยพื้นฐานแล้วพวกมันถูกจำกัดโดยแบนด์วิดท์เชิงกล ลักษณะเฉพาะของฟันเฟือง และความหนาแน่นของแรงบิดของแอคทูเอเตอร์ข้อต่อแต่ละตัวที่ประกอบเป็นสายโซ่จลนศาสตร์ หุ่นยนต์แบบหกแกนที่มีข้อต่อแบบหกแกนที่มีความแม่นยำเอนด์เอฟเฟ็กเตอร์ต่ำกว่ามิลลิเมตร ต้องใช้ข้อต่อแต่ละข้อในการให้ความละเอียดของตำแหน่งเชิงมุมในช่วงอาร์ควินาที พร้อมด้วยความแข็งแบบบิดที่ป้องกันการโก่งตัวภายใต้โมเมนต์ที่เกิดจากน้ำหนักบรรทุก
ตัวกระตุ้นมอเตอร์ข้อต่อหุ่นยนต์: ND-A5215-10จาก iHF Group นำเสนอโซลูชันที่ได้รับการออกแบบทางวิศวกรรมตามวัตถุประสงค์สำหรับชั้นข้อจำกัดนี้ แทนที่จะประกอบเซอร์โวมอเตอร์ กระปุกเกียร์ และตัวเข้ารหัสทั่วไปไว้ในการกำหนดค่าร่วมกัน iHF Group ได้รวมระบบย่อยเหล่านี้ไว้ในโมดูลแอคชูเอเตอร์แบบรวมที่ได้รับการปรับให้เหมาะสมโดยเฉพาะสำหรับกลไก ความร้อน และไดนามิกการควบคุมของข้อต่อของหุ่นยนต์

สถาปัตยกรรมเครื่องกลไฟฟ้าแบบบูรณาการ
โทโพโลยีมอเตอร์แรงบิดแบบไร้กรอบ
การออกแบบข้อต่อหุ่นยนต์แบบดั้งเดิมใช้เซอร์โวมอเตอร์ที่ติดตั้งร่วมกับกระปุกเกียร์ของดาวเคราะห์หรือฮาร์มอนิกผ่านข้อต่อทางกล ส่วนประกอบนี้ทำให้เกิดข้อผิดพลาดในการจัดตำแหน่ง ระยะฟันเฟืองของข้อต่อ และความยาวแกนที่เพิ่มขึ้น ซึ่งส่งผลต่อความแน่นของข้อต่อและการตอบสนองแบบไดนามิก
ND-A5215-10 ใช้สถาปัตยกรรมมอเตอร์แรงบิดแบบไร้กรอบ โดยโรเตอร์จะรวมเข้ากับเพลาเอาท์พุตข้อต่อโดยตรง และสเตเตอร์เข้ากับตัวเรือนข้อต่อ การกำจัดตัวเรือนมอเตอร์และส่วนเชื่อมต่อข้อต่อที่แยกจากกันนี้จะช่วยลดความยาวของข้อต่อลง 30-40% เมื่อเทียบกับชุดประกอบทั่วไป ช่วยให้อัตราส่วนน้ำหนักบรรทุกต่อน้ำหนักสูงขึ้นและซองหุ่นยนต์ที่มีขนาดกะทัดรัดมากขึ้น มอเตอร์แรงบิดขับเคลื่อนโดยตรงให้แรงบิดต่อเนื่อง 15 Nm พร้อมความสามารถสูงสุด 45 Nm ให้ความหนาแน่นของแรงบิดสูงที่ความเร็วต่ำซึ่งข้อต่อหุ่นยนต์ต้องการโดยไม่สูญเสียประสิทธิภาพและฟันเฟืองของการลดเกียร์แบบหลายขั้นตอน
การลดความแม่นยำของฮาร์มอนิกไดรฟ์
ในขณะที่มอเตอร์แรงบิดแบบไร้กรอบให้ความหนาแน่นของแรงบิดที่ดีเยี่ยม ความเร็วเอาท์พุตที่จำเป็นสำหรับโปรไฟล์การเคลื่อนที่ของข้อต่อหุ่นยนต์ทั่วไป (โดยทั่วไปคือ 30-120 RPM) จำเป็นต้องลดความเร็วลง ND-A5215-10 ผสานรวมตัวลดไดรฟ์ฮาร์มอนิกเข้ากับอัตราทดเกียร์ 100:1 ทำให้สามารถลดขั้นตอนเดียวด้วยคุณลักษณะระยะฟันเฟืองเป็นศูนย์ ซึ่งระบบดาวเคราะห์หรือไซโคลลอยด์ไม่สามารถจำลองได้
เทคโนโลยีการขับเคลื่อนฮาร์มอนิกใช้ Flexspline ที่เสียรูปโดยเครื่องกำเนิดคลื่นเทียบกับร่องฟันแบบวงกลม ทำให้เกิดการเชื่อมต่อแบบหลายซี่ฟันไปพร้อมๆ กัน ซึ่งกระจายน้ำหนักไปทั่วทั้ง 30% ของฟันที่มีอยู่ รูปทรงการมีส่วนร่วมนี้ให้ความสามารถในการทำซ้ำตำแหน่งที่ ±10 อาร์ค-วินาที และความแข็งเชิงบิดเกิน 20,000 Nm/rad ซึ่งเป็นข้อกำหนดเฉพาะที่แปลโดยตรงเป็นความแม่นยำของเอฟเฟกต์ปลายในการกำหนดค่าแบบหลายแกน
การผลิตแอคชูเอเตอร์มอเตอร์ข้อต่อหุ่นยนต์ที่มีความแม่นยำของ iHF Group จะตรวจสอบส่วนประกอบของไดรฟ์ฮาร์มอนิกผ่านการวัดโปรไฟล์ของรูปแบบฟันแบบเฟล็กสไปลน์ รูปทรงของร่องร่องฟันแบบวงกลม และการเบี่ยงเบนหนีศูนย์ของแบริ่งกำเนิดคลื่น การประกอบรวมเอาโปรโตคอลการโหลดล่วงหน้าที่ปรับรูปแบบการสัมผัสแบบตาข่ายให้เหมาะสมโดยไม่ทำให้เกิดความเครียดแบบยืดหยุ่นมากเกินไปซึ่งจะส่งผลต่ออายุการใช้งานที่ล้า
สถาปัตยกรรมป้อนกลับตัวเข้ารหัสแบบสัมบูรณ์แบบคู่
การควบคุมตำแหน่งในข้อต่อหุ่นยนต์จำเป็นต้องมีการป้อนกลับที่จุดที่แตกต่างกันสองจุด: ตำแหน่งโรเตอร์ของมอเตอร์สำหรับการสับเปลี่ยนและการควบคุมกระแสเวกเตอร์ และตำแหน่งเพลาเอาท์พุตสำหรับการปิดลูปเซอร์โวระดับข้อต่อ ND-A5215-10 ผสานรวมตัวเข้ารหัสสัมบูรณ์คู่ ได้แก่ ตัวเข้ารหัสหลายเทิร์น 23 บิตบนโรเตอร์มอเตอร์ และตัวเข้ารหัสรอบเดียว 19 บิตบนเอาต์พุตไดรฟ์ฮาร์มอนิก
การกำหนดค่าตัวเข้ารหัสคู่นี้ช่วยให้ใช้กลยุทธ์การควบคุมขั้นสูงได้: การชดเชยแรงบิดกระเพื่อมผ่านตำแหน่งมอเตอร์ป้อนไปข้างหน้า การชดเชยฟันเฟืองผ่านการตอบสนองตำแหน่งเอาต์พุต และการตรวจจับการชนผ่านการประมาณแรงบิดทันทีจากกระแสมอเตอร์และอนุพันธ์ของตำแหน่ง การเข้ารหัสแบบสัมบูรณ์จะกำจัดลำดับการกลับบ้านเมื่อเปิดเครื่อง ลดเวลาเริ่มต้นหุ่นยนต์ และช่วยให้สามารถกู้คืนการทำงานได้อย่างปลอดภัยหลังจากการหยุดฉุกเฉิน

การจัดการระบายความร้อนและประสิทธิภาพการทำงานต่อเนื่อง
วิศวกรรมเส้นทางความร้อน
มอเตอร์แรงบิดแบบไร้เฟรมสร้างการสูญเสียความต้านทาน (I²R) ในขดลวดสเตเตอร์ซึ่งจะต้องกระจายออกไปเพื่อป้องกันการเสื่อมสภาพของฉนวนและการล้างอำนาจแม่เหล็กของแม่เหล็กโรเตอร์ของแรร์เอิร์ธ ในการกำหนดค่าข้อต่อขนาดกะทัดรัดซึ่งมีมอเตอร์ฝังอยู่ภายในตัวเรือนข้อต่อ การระบายความร้อนด้วยอากาศแบบธรรมดาไม่สามารถทำได้
ND-A5215-10 ใช้วงจรระบายความร้อนด้วยของเหลวที่รวมอยู่ในตัวเรือนข้อต่อ โดยมีทางเดินน้ำหล่อเย็นที่ตัดเฉือนในโครงสร้างโลหะผสมอะลูมิเนียมที่สัมผัสโดยตรงกับชั้นเคลือบสเตเตอร์ การออกแบบนี้ให้ความต้านทานความร้อนตั้งแต่ขดลวดจนถึงน้ำหล่อเย็น 0.15 K/W ทำให้สามารถทำงานต่อเนื่องที่แรงบิดปกติโดยมีอุณหภูมิน้ำหล่อเย็นขาเข้าสูงถึง 35°C สำหรับการใช้งานที่ไม่มีน้ำหล่อเย็นในโรงงาน iHF Group นำเสนอรูปแบบระบายความร้อนด้วยอากาศที่ได้รับการปรับปรุงด้านความร้อน พร้อมด้วยรูปทรงครีบที่ขยายและการพาความร้อนภายใน
การสร้างแบบจำลองความร้อนและการป้องกัน
iHF Group นำเสนอแบบจำลองความร้อนที่ปรับเทียบตามโปรไฟล์การเคลื่อนไหวของหุ่นยนต์เฉพาะ ช่วยให้ลูกค้าสามารถคาดการณ์อุณหภูมิที่เพิ่มขึ้นของขดลวดภายใต้รอบการทำงานที่คาดการณ์ไว้ เซ็นเซอร์อุณหภูมิในตัว (PT1000 RTD ที่ฝังอยู่ในจุดสิ้นสุดของขดลวด) ให้การตรวจสอบความร้อนแบบเรียลไทม์พร้อมการป้องกันอุณหภูมิเกิน ซึ่งจะลดคำสั่งปัจจุบันก่อนที่จะถึงเกณฑ์ความเสียหาย
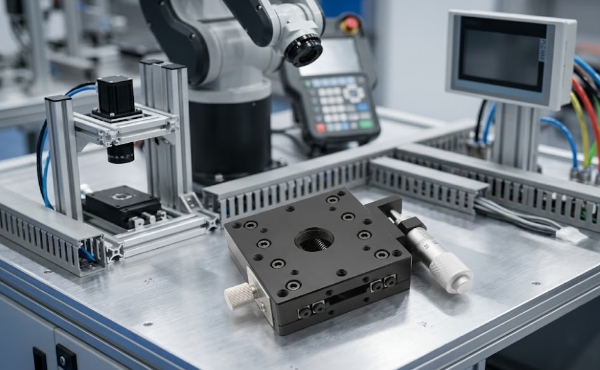
บูรณาการทางกลและมาตรฐานอินเทอร์เฟซ
สถาปัตยกรรมเพลากลวง
ND-A5215-10 มีรูเจาะตรงกลางขนาดเส้นผ่านศูนย์กลาง 15 มม. ช่วยให้สายไฟ สายไฟสัญญาณ สายนิวแมติก หรือเส้นใยนำแสงผ่านศูนย์กลางข้อต่อได้ แทนที่จะกำหนดเส้นทางจากภายนอก การออกแบบเพลากลวงนี้ช่วยลดความซับซ้อนในการจัดการสายเคเบิลในหุ่นยนต์หลายแกน ลดความเสี่ยงในการกีดขวางระหว่างการเคลื่อนไหว และรักษารูปทรงภายนอกที่สะอาดสำหรับการใช้งานหุ่นยนต์ร่วมปฏิบัติงานที่คาดว่าจะมีมนุษย์อยู่ใกล้กัน
ความเข้ากันได้ของอินเทอร์เฟซการติดตั้ง
iHF Group สร้างมาตรฐานอินเทอร์เฟซเชิงกล ND-A5215-10 ให้เป็นรูปแบบหน้าแปลน ISO 9409-1 ช่วยให้สามารถบูรณาการโดยตรงกับแขนหุ่นยนต์ที่มีจำหน่ายในท้องตลาดโดยไม่ต้องมีการผลิตอะแดปเตอร์แบบกำหนดเอง เพลาเอาท์พุตประกอบด้วยส่วนต่อประสานแบบมีกุญแจหรือแบบร่องซึ่งมีความสามารถในการส่งแรงบิดเกินเอาท์พุตสูงสุดของแอคทูเอเตอร์ ช่วยป้องกันความล้มเหลวของส่วนต่อประสานภายใต้สภาวะหยุดนิ่งหรือการชนกัน


บูรณาการระบบควบคุม
โปรโตคอลการสื่อสาร EtherCAT
ND-A5215-10 ผสานรวมระบบอิเล็กทรอนิกส์ของเซอร์โวไดรฟ์เข้ากับการสื่อสารฟิลด์บัส EtherCAT ซึ่งช่วยให้รอบเวลา 1 มิลลิวินาทีสำหรับการอัปเดตคำสั่งตำแหน่ง และ 125μs สำหรับการปิดลูปแรงบิด แบนด์วิธการสื่อสารนี้รองรับอัลกอริธึมการควบคุมการเคลื่อนไหวขั้นสูง: การควบคุมอิมพีแดนซ์สำหรับการจำกัดแรงของหุ่นยนต์ร่วมปฏิบัติงาน การลดแรงสั่นสะเทือนผ่านการตอบรับการเร่งความเร็วระดับข้อต่อ และการบำรุงรักษาแบบคาดการณ์ผ่านแนวโน้มพารามิเตอร์ของมอเตอร์
บูรณาการฟังก์ชั่นความปลอดภัย
ความปลอดภัยในการใช้งานสำหรับ SIL 3 / PL e ทำได้ผ่านการตรวจสอบตำแหน่งสำรอง (ตัวเข้ารหัสคู่ที่มีการเปรียบเทียบข้าม) วงจรแรงบิดที่ปลอดภัย (STO) พร้อมอินเตอร์ล็อคของฮาร์ดแวร์ และการควบคุมเบรกที่ปลอดภัยสำหรับแกนที่รับน้ำหนักด้วยแรงโน้มถ่วง iHF Group จัดทำเอกสารด้านความปลอดภัย รวมถึงการวิเคราะห์ FMEDA และรายงานการทดสอบการฉีดข้อผิดพลาด เพื่อสนับสนุนเครื่องหมาย CE ของลูกค้าและกระบวนการรับรองความปลอดภัยในการใช้งาน
โดเมนแอปพลิเคชัน
หุ่นยนต์ร่วมมือ
ขอบเขตขนาดกะทัดรัด ความเฉื่อยสะท้อนต่ำ และความสามารถในการควบคุมที่ไวต่อแรงของ ND-A5215-10 ทำให้เหมาะสำหรับข้อต่อหุ่นยนต์ที่ทำงานร่วมกันซึ่งปฏิสัมพันธ์ระหว่างมนุษย์กับหุ่นยนต์ต้องการความปลอดภัยจากภายในผ่านการตรวจสอบแรงบิดและตำแหน่งมากกว่าการป้องกันจากภายนอก ความสามารถในการถอยกลับสูงของไดรฟ์ฮาร์มอนิกช่วยให้เกิดการเคลื่อนไหวที่สอดคล้องเมื่อมีการใช้แรงภายนอก โดยระบบควบคุมจะตรวจจับแรงสัมผัสที่ต่ำกว่า 150N ที่เอฟเฟกต์ส่วนปลาย
หุ่นยนต์ผ่าตัดและการแพทย์
การใช้งานหุ่นยนต์ทางการแพทย์ต้องการความเข้ากันได้ของการฆ่าเชื้อ ความเข้ากันได้ทางแม่เหล็กไฟฟ้าสำหรับสภาพแวดล้อมในห้องผ่าตัด และความแม่นยำของตำแหน่งสำหรับการจัดการเนื้อเยื่อ iHF Group นำเสนอ ND-A5215-10 พร้อมพื้นผิวเกรดทางการแพทย์ สารหล่อลื่นที่เข้ากันได้ทางชีวภาพ และชุดสายเคเบิลหุ้มฉนวนที่ตรงตามข้อกำหนดความเข้ากันได้ทางแม่เหล็กไฟฟ้า IEC 60601-1
การผลิตเซมิคอนดักเตอร์และอิเล็กทรอนิกส์
ความเข้ากันได้ของห้องปลอดเชื้อ (ISO คลาส 3) การสร้างอนุภาคน้อยที่สุด และการทำงานที่ปราศจากการสั่นสะเทือน ถือเป็นสิ่งสำคัญในการจัดการแผ่นเวเฟอร์และการประกอบอุปกรณ์อิเล็กทรอนิกส์ ไดรฟ์ฮาร์มอนิกแบบปิดและมอเตอร์ไร้กรอบของ ND-A5215-10 ช่วยลดการสึกหรอของแปรง ในขณะที่การปรับสมดุลอย่างแม่นยำและการโหลดล่วงหน้าของแบริ่งจะช่วยลดการส่งผ่านการสั่นสะเทือนไปยังอุปกรณ์กระบวนการที่มีความละเอียดอ่อน
คำถามที่พบบ่อย
ถาม: ความสามารถในการบรรทุกสูงสุดเมื่อใช้ ND-A5215-10 ในการกำหนดค่าหุ่นยนต์หกแกนคือเท่าใด
ตอบ: ความสามารถในการบรรทุกน้ำหนักขึ้นอยู่กับความยาวของแขน รูปแบบการเร่งความเร็ว และรอบการทำงาน ไม่ใช่แรงบิดของแอคชูเอเตอร์เพียงอย่างเดียว สำหรับหุ่นยนต์หกแกนเข้าถึงขนาด 800 มม. ทั่วไปที่มี ND-A5215-10 ที่ข้อต่อ 2, 3 และ 4 และแอคชูเอเตอร์ขนาดเล็กที่ข้อต่อข้อมือ น้ำหนักบรรทุกสูงสุดจะอยู่ที่ประมาณ 10-15 กก. ที่อัตราเร่ง 1 กรัมพร้อมรอบการทำงาน 50% iHF Group นำเสนอเครื่องมือจำลองจลนศาสตร์เพื่อเพิ่มประสิทธิภาพการเลือกแอคชูเอเตอร์สำหรับรูปทรงหุ่นยนต์และข้อกำหนดในการเคลื่อนที่เฉพาะ
ถาม: ND-A5215-10 สามารถทำงานได้โดยไม่ต้องระบายความร้อนด้วยของเหลวในสภาพแวดล้อมแวดล้อมที่มีอุณหภูมิสูงถึง 40°C หรือไม่
ตอบ: รุ่นระบายความร้อนด้วยอากาศจะรักษาแรงบิดต่อเนื่องพิกัดได้สูงถึง 35°C โดยรอบโดยมีการพาความร้อนตามธรรมชาติ และสูงถึง 40°C โดยมีการลดพิกัดไว้ที่ 80% ของแรงบิดพิกัด สำหรับการใช้งานอย่างต่อเนื่องที่อุณหภูมิสูงกว่า 40°C หรือในการติดตั้งที่จำกัดซึ่งมีการไหลเวียนของอากาศที่จำกัด แนะนำให้ใช้การระบายความร้อนด้วยของเหลว บริการจำลองความร้อนของ iHF Group สามารถคาดการณ์ประสิทธิภาพสำหรับเงื่อนไขการติดตั้งเฉพาะได้
ถาม: ช่วงการบำรุงรักษาใดที่แนะนำสำหรับตัวลดไดรฟ์ฮาร์มอนิก
ตอบ: ภายใต้สภาวะการทำงานปกติ (แรงบิดที่กำหนด โหลดแรงกระแทกปานกลาง การหล่อลื่นที่เพียงพอ) เฟล็กซ์สปริงของไดรฟ์ฮาร์มอนิกจะมีอายุการใช้งานที่ล้าเกิน 10,000 ชั่วโมงในการทำงาน iHF Group แนะนำให้ตรวจสอบสภาพแบริ่งเอาท์พุตประจำปีผ่านการวิเคราะห์การสั่นสะเทือน และเปลี่ยนน้ำมันหล่อลื่นทุกๆ 5,000 ชั่วโมงการทำงานหรือ 2 ปี แล้วแต่กรณีใดจะเกิดขึ้นก่อน ฟังก์ชันการตรวจสอบสภาพแบบบูรณาการสามารถขยายช่วงเวลาเหล่านี้ผ่านอัลกอริธึมการบำรุงรักษาเชิงคาดการณ์
ถาม: ND-A5215-10 เข้ากันได้กับตัวควบคุมเซอร์โวของบริษัทอื่นหรือไม่
ตอบ: ND-A5215-10 ได้รับการปรับให้เหมาะสมสำหรับการใช้งานร่วมกับเซอร์โวไดรฟ์ในตัวของ iHF Group แต่พารามิเตอร์ของมอเตอร์ (ความต้านทานเฟส ตัวเหนี่ยวนำ ค่าคงที่ back-EMF โปรโตคอลตัวเข้ารหัส) ได้รับการบันทึกไว้เพื่อรองรับการรวมตัวควบคุมของบริษัทอื่น ลูกค้าควรตรวจสอบความเข้ากันได้ของแบนด์วิดท์ลูปปัจจุบันและอัลกอริทึมการสับเปลี่ยนกับทีมวิศวกรรมแอปพลิเคชันของ iHF Group ก่อนที่จะระบุตัวควบคุมที่ไม่รวมในตัว
ถาม: ข้อกำหนดระยะฟันเฟืองคืออะไร และส่งผลต่อความสามารถในการทำซ้ำของหุ่นยนต์อย่างไร
ตอบ: ตัวลดไดรฟ์ฮาร์มอนิกมีฟันเฟืองเป็นศูนย์ผ่านรูปทรงตาข่ายแบบยืดหยุ่น ฮิสเทรีซีสที่วัดที่เพลาเอาท์พุตโดยทั่วไปคือ ±3 อาร์ควินาทีภายใต้สภาวะที่ไม่มีโหลด ในการใช้งานหุ่นยนต์ในทางปฏิบัติ ความสอดคล้องของโครงสร้างและความละเอียดของตัวเข้ารหัสมีอิทธิพลเหนือความสามารถในการทำซ้ำมากกว่าฟันเฟืองเฟือง โดย ND-A5215-10 มีส่วนน้อยกว่า 5% ของข้อผิดพลาดในการทำซ้ำของระบบทั้งหมดในห่วงโซ่จลนศาสตร์ที่ออกแบบมาอย่างดี

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar ขอใบเสนอราคา
ขอใบเสนอราคา