
 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar ขอใบเสนอราคา
ขอใบเสนอราคา 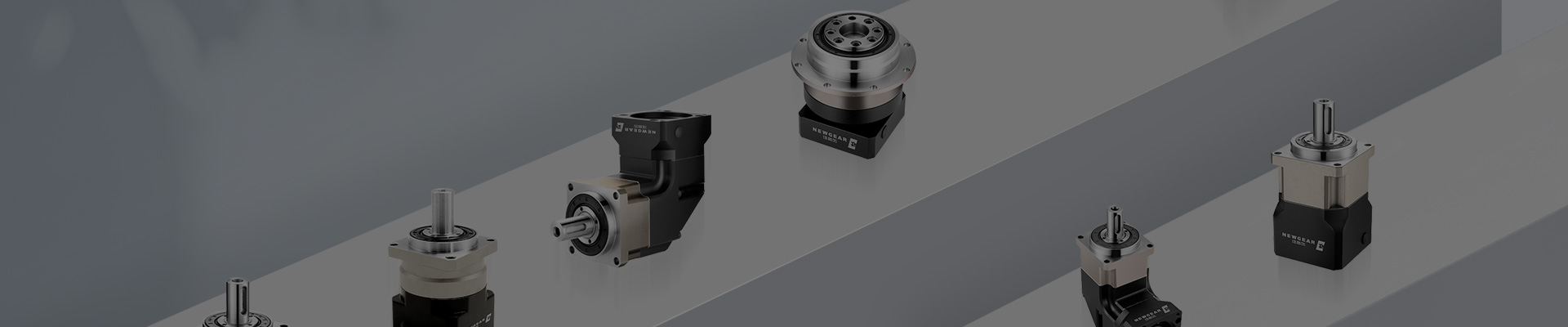

ศูนย์ผลิตภัณฑ์
ติดต่อเรา







ข้อความออนไลน์
-
*
-
-
-
นี่คือพื้นที่โฆษณา
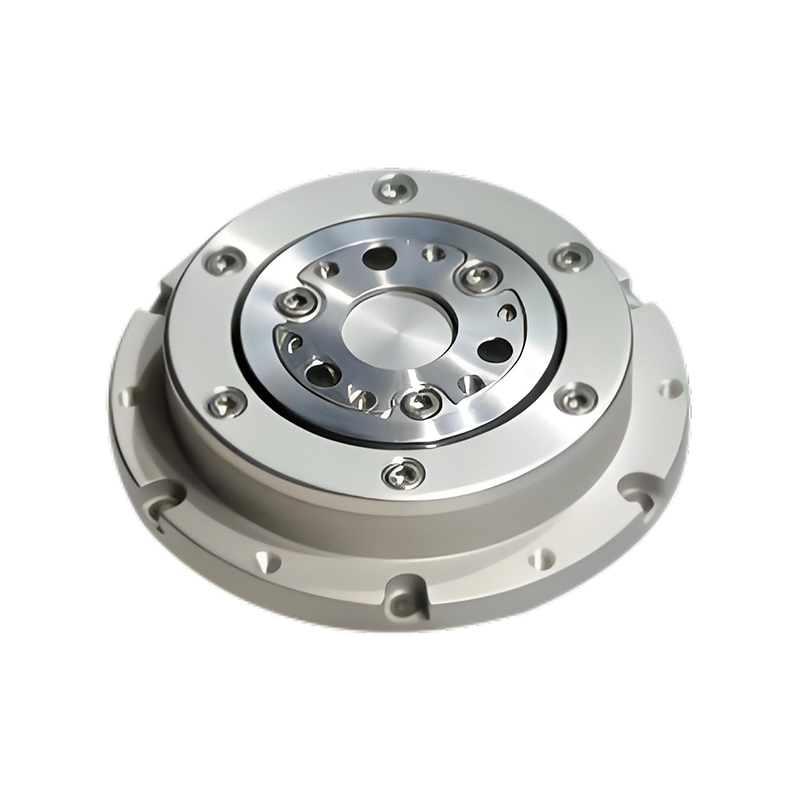
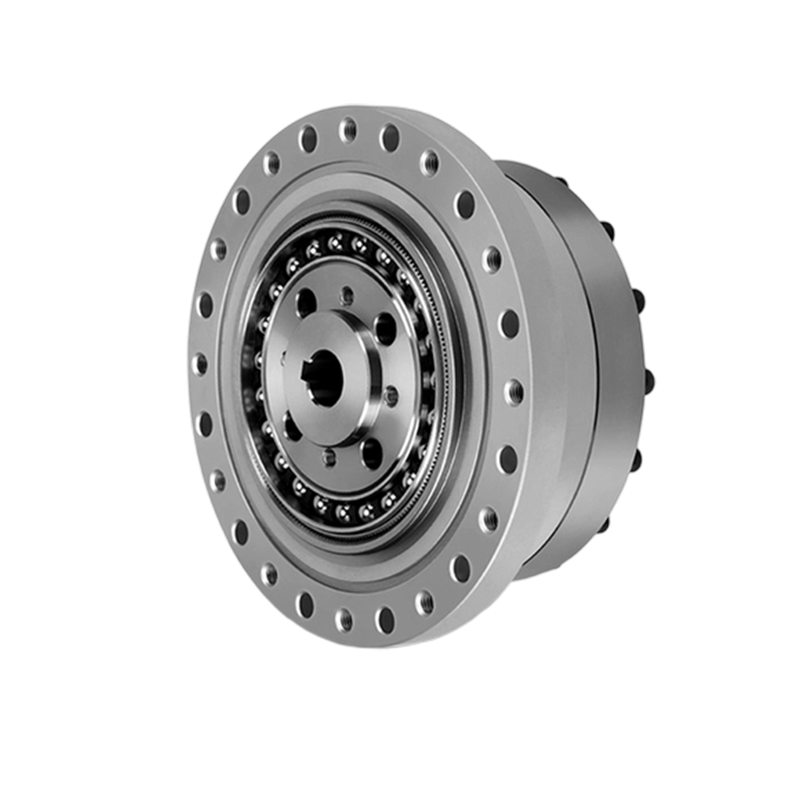
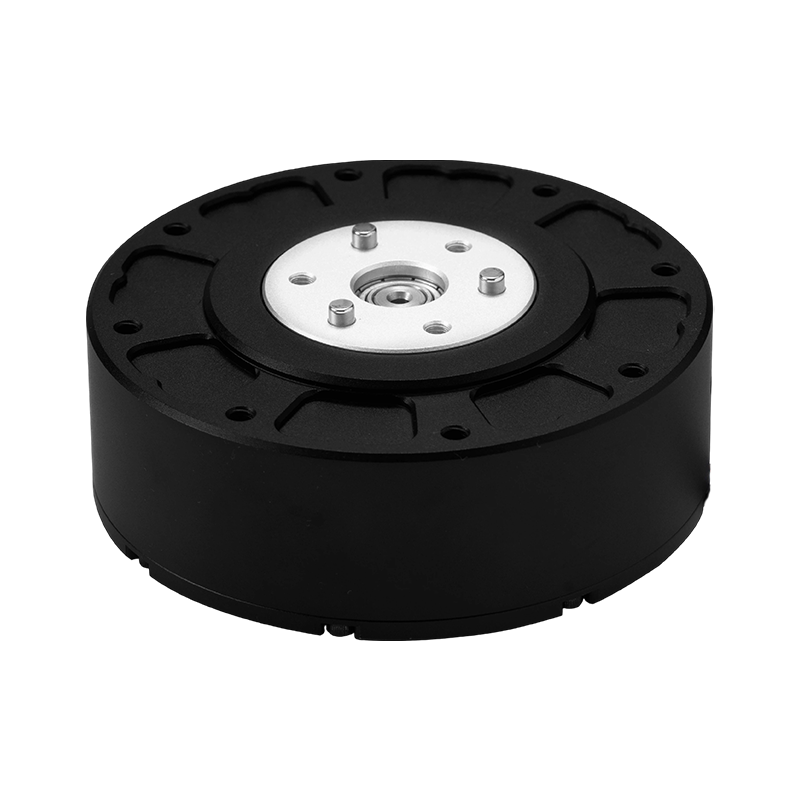
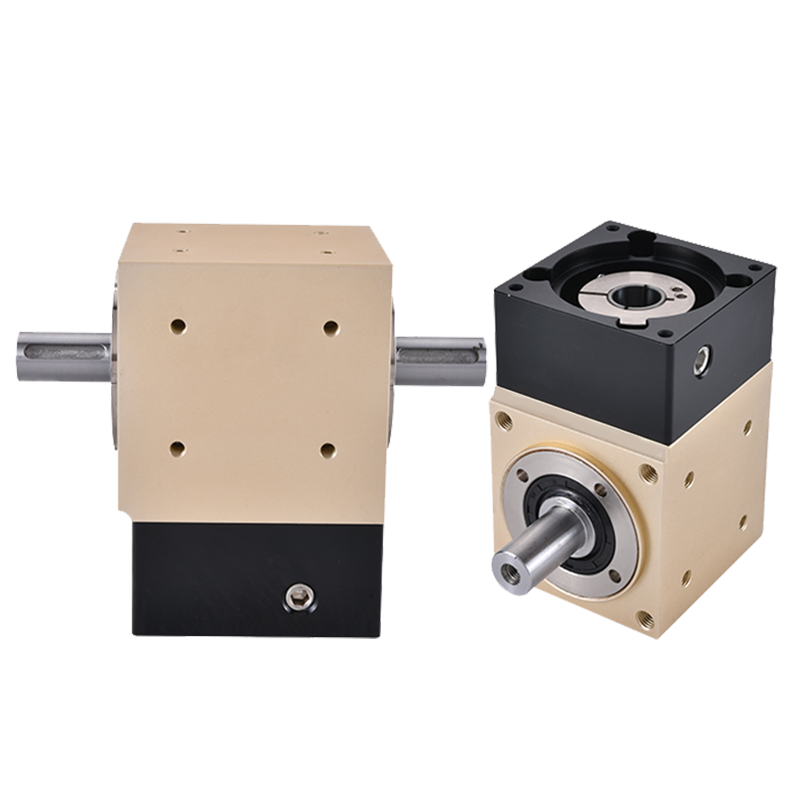
บริษัท Newgear Intelligent Transmission (Guangdong) Co., Ltd. ซึ่งเป็นบริษัทด้านเทคโนโลยีขั้นสูงที่เชี่ยวชาญด้านระบบส่งกำลังที่มีความแม่นยำ



