▌ส่วนที่ 1: ตัวกระตุ้นในฐานะระบบประสาทของหุ่นยนต์
การเคลื่อนไหวของหุ่นยนต์ทุกครั้ง ตั้งแต่การจัดการการผ่าตัดระดับไมครอนไปจนถึงการคัดแยกลอจิสติกส์ความเร็วสูง มีต้นกำเนิดที่ตัวกระตุ้นข้อต่อ แต่การเลือกแอคชูเอเตอร์มักถือเป็นงานจัดซื้อมากกว่าปัญหาทางวิศวกรรมระดับระบบ
ในความเป็นจริง แอคชูเอเตอร์มอเตอร์ข้อต่อหุ่นยนต์จะต้องจัดการแรงบิดกระเพื่อม พฤติกรรมทางความร้อน เวลาแฝงของตัวเข้ารหัส ฮาร์โมนิกของตาข่ายเกียร์ และความเสถียรของวงปิดไปพร้อมๆ กัน จุดอ่อนใดๆ ในพารามิเตอร์ตัวเดียวจะแพร่กระจายผ่านห่วงโซ่จลนศาสตร์ทั้งหมด ส่งผลให้ความแม่นยำและความสามารถในการทำซ้ำลดลง
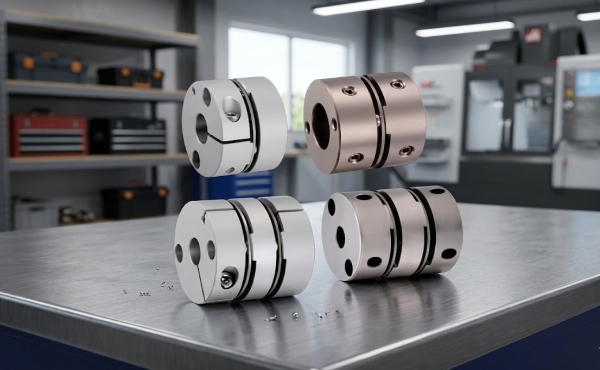
แอคทูเอเตอร์มอเตอร์ข้อต่อหุ่นยนต์ ND-A5216-10พัฒนาโดย iHF Group แก้ไขปัญหานี้โดยการผสานรวมมอเตอร์ กระปุกเกียร์ดาวเคราะห์ และฟีดแบ็กของตัวเข้ารหัสคู่เข้ากับระบบที่ออกแบบร่วมกันที่เป็นหนึ่งเดียว แทนที่จะเป็นส่วนประกอบที่แยกจากกัน สิ่งนี้จะกำจัดการสูญเสียอินเทอร์เฟซและปรับปรุงความสอดคล้องแบบไดนามิกในทุกรูปแบบการปฏิบัติงาน

▌ส่วนที่ II: รายละเอียดทางวิศวกรรมของ ND-A5216-10
2.1 การออกแบบแม่เหล็กไฟฟ้า: การปราบปรามแรงบิดของ Cogging
ความท้าทายหลักในการเคลื่อนที่อย่างแม่นยำคือแรงบิดที่เกิดจากการทำงานร่วมกันของโรเตอร์-สเตเตอร์ มันสร้างคลื่นความเร็วต่ำ การล่าสัตว์ตามตำแหน่ง และเสียงรบกวน
ND-A5216-10 บรรเทาปัญหานี้ด้วยรูปทรงของช่องที่ปรับให้เหมาะสมและการออกแบบโรเตอร์แม่เหล็กที่บิดเบี้ยว การเพิ่มประสิทธิภาพขององค์ประกอบจำกัดช่วยให้มั่นใจได้ถึงแรงบิดที่ราบรื่นแม้จะต่ำกว่า 100 RPM ซึ่งเป็นช่วงวิกฤตสำหรับการประกอบที่แม่นยำ การควบคุมแรง และงานแทรกที่ละเอียดอ่อน
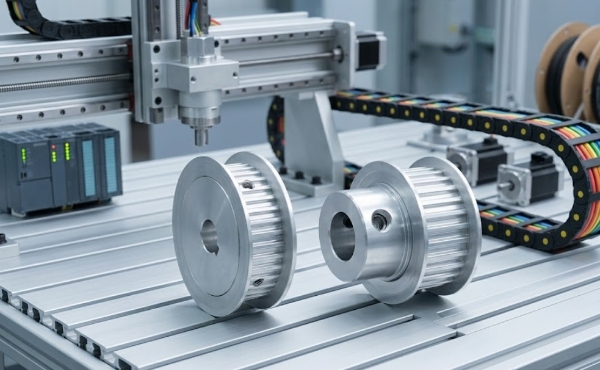
2.2 การลดเกียร์ดาวเคราะห์: <3 อาร์คนาทีแบ็กแลช
แอคทูเอเตอร์ผสานรวมกระปุกเกียร์ดาวเคราะห์แบบเฮลิคอลที่มีความแม่นยำสูงพร้อมฟันเฟืองที่ต่ำกว่า 3 อาร์คนาที (0.05°) บนแขน 1 เมตร ค่านี้สอดคล้องกับค่าเบี่ยงเบนส่วนปลาย <0.87 มม. จากฟันเฟืองเกียร์เพียงอย่างเดียว
เฟืองเกลียวช่วยให้การมีส่วนร่วมก้าวหน้า โดยนำเสนอ:
● ความหนาแน่นของแรงบิดสูงกว่าเฟืองเดือย
● ลดการส่งผ่านการสั่นสะเทือน
● ลดการปล่อยเสียงรบกวนสำหรับสภาพแวดล้อมที่ปลอดภัยต่อมนุษย์
เมื่อเปรียบเทียบกับระบบเดือย การลดดาวเคราะห์แบบขดลวดจะช่วยเพิ่มความนุ่มนวลและการกระจายโหลด เพิ่มเสถียรภาพของโครงสร้างและการตอบสนองแบบไดนามิก
2.3 สถาปัตยกรรมตัวเข้ารหัสคู่
ต่างจากระบบตัวเข้ารหัสเดี่ยวที่อนุมานการเคลื่อนที่ของเอาท์พุตผ่านอัตราทดเกียร์ ND-A5216-10 ใช้ตัวเข้ารหัสคู่:
● ตัวเข้ารหัสฝั่งมอเตอร์สำหรับการควบคุมการสับเปลี่ยนและความเร็ว
● ตัวเข้ารหัสด้านเอาต์พุตสำหรับตำแหน่งเพลาที่แท้จริง
ซึ่งช่วยลดข้อผิดพลาดสะสมจากฟันเฟือง การปฏิบัติตามแรงบิด และการขยายตัวเนื่องจากความร้อน นอกจากนี้ยังเปิดใช้งานการวินิจฉัยแบบเรียลไทม์โดยการเปรียบเทียบความเบี่ยงเบนของตำแหน่งมอเตอร์และเอาต์พุต ทำให้สามารถตรวจจับการสึกหรอทางกลได้ตั้งแต่เนิ่นๆ
2.4 การควบคุมวงปิดแบบครบวงจร
แอคทูเอเตอร์รองรับแรงบิด ความเร็ว และการควบคุมตำแหน่งพร้อมกันผ่านลูปควบคุมแบบเรียงซ้อน:
● ทอร์กลูป:แบนด์วิดท์ 1–5 kHz
● วงความเร็ว: 200–500 Hz
● ลูปตำแหน่ง: 50–200 Hz
ไดนามิกแบบผกผันของฟีดไปข้างหน้าจะชดเชยความเฉื่อยและผลกระทบที่ไม่เป็นเชิงเส้น ช่วยลดข้อผิดพลาดในการติดตามระหว่างการเร่งความเร็วอย่างรวดเร็ว ช่วยให้สามารถสลับระหว่างการเคลื่อนไหวความเร็วสูงและการควบคุมแรงที่เป็นไปตามข้อกำหนดได้อย่างราบรื่นโดยไม่ต้องเปลี่ยนโหมด

▌ส่วนที่ 3: ประสิทธิภาพแบบไดนามิกและความร้อน
3.1 การกลับทิศทางอย่างรวดเร็ว
รอบเวลาในวิทยาการหุ่นยนต์มักถูกครอบงำโดยการชะลอตัวและการกลับตัวมากกว่าความเร็วสูงสุด ND-A5216-10 ช่วยลดความล่าช้าในการกลับรายการโดย:
● ความเฉื่อยของโรเตอร์ต่ำ
● แบนด์วิธลูปกระแสสูง
● ควบคุมการปฏิบัติตามกลไกในขบวนเกียร์
สิ่งนี้จะลดการสั่นไหวและปรับปรุงปริมาณงานในระบบหยิบและวาง การเชื่อม และระบบตรวจสอบ
3.2 การจัดการความร้อน
ความเสถียรทางความร้อนเป็นสิ่งสำคัญในการทำงานต่อเนื่อง การเพิ่มขึ้นของอุณหภูมิจะเพิ่มความต้านทาน ลดค่าคงที่ของแรงบิด และเร่งอายุของฉนวน
แอคชูเอเตอร์จัดการเรื่องนี้ผ่าน:
● การออกแบบสเตเตอร์สเตเตอร์แบบเติมทองแดงสูง
● วัสดุปลูกที่นำความร้อนได้
● โครงอะลูมิเนียมแบบยางเพื่อการหมุนเวียนที่ดีขึ้น
คุณสมบัติเหล่านี้ช่วยลดการลดพิกัดและรักษาแรงบิดที่เสถียรในการทำงานตลอด 24 ชั่วโมงทุกวัน
▌ส่วนที่ 4: โดเมนแอปพลิเคชัน
4.1 การผลิตที่มีความแม่นยำ
ในการผลิตชิ้นส่วนขนาดเล็กและอิเล็กทรอนิกส์ ข้อกำหนดด้านความแม่นยำอยู่ที่ ±0.02–0.05 มม. ND-A5216-10 ช่วยให้เกิดระยะฟันเฟืองต่ำ การตอบสนองแบบคู่ และเอาต์พุตแรงบิดที่ราบรื่น มีประสิทธิภาพเป็นพิเศษในข้อต่อข้อมือของแขนหุ่นยนต์หลายแกนสำหรับงานการวางแนวที่ละเอียด
4.2 หุ่นยนต์ร่วมมือ
โคบอทต้องปฏิบัติตามขีดจำกัดแรง ISO/TS 15066 ในขณะที่ยังคงรักษาประสิทธิภาพการผลิตไว้ได้ แรงเสียดทานต่ำของแอคชูเอเตอร์ การตอบสนองแรงบิดที่รวดเร็ว และการออกแบบเสียงรบกวนต่ำช่วยให้มีปฏิสัมพันธ์กับมนุษย์ได้อย่างปลอดภัย การใส่เกียร์แบบเฮลิคอลช่วยลดเอาต์พุตเสียง ปรับปรุงการใช้งานในสถานที่ทำงาน
4.3 โลจิสติกส์อัตโนมัติ
ใน AGV และระบบคัดแยก ความสามารถในการปรับตัวถือเป็นสิ่งสำคัญ การควบคุมโหมดแรงบิดช่วยให้สามารถจัดการน้ำหนักบรรทุกที่แตกต่างกัน ตั้งแต่สิ่งของที่เปราะบางไปจนถึงพัสดุที่มีน้ำหนักมาก โดยไม่ต้องเปลี่ยนฮาร์ดแวร์ การเร่งความเร็วและการชะลอตัวอย่างรวดเร็วช่วยปรับปรุงประสิทธิภาพการรับส่งข้อมูลโดยตรง
4.4 ระบบการตรวจสอบและห้องปฏิบัติการ
การตรวจสอบมาตรวิทยาและเซมิคอนดักเตอร์ต้องใช้สภาพแวดล้อมที่มีการสั่นสะเทือนต่ำเป็นพิเศษ การปรับสมดุลของโรเตอร์และการเข้าเกียร์อย่างราบรื่นของแอคชูเอเตอร์จะช่วยลดการส่งผ่านการสั่นสะเทือน จึงมั่นใจได้ถึงความเสถียรในการวัดในอุปกรณ์ที่มีความละเอียดอ่อนที่อยู่ติดกัน
▌ส่วนที่ 5: ปรัชญาวิศวกรรมกลุ่ม iHF
ที่ iHF Group การพัฒนาแอคชูเอเตอร์เป็นไปตามปรัชญาการออกแบบร่วมระดับระบบ:
● การเพิ่มประสิทธิภาพความหนาแน่นของแรงบิดทั่วทั้งโดเมนแม่เหล็กไฟฟ้า ความร้อน และกลไก
● การจำลองแบบหลายฟิสิกส์เพื่อกำจัดฟันเฟืองและความอิ่มตัวของสีตั้งแต่เนิ่นๆ
● การควบคุมการสั่นสะเทือนระดับระบบที่รวมแอคชูเอเตอร์และโครงสร้างเข้าด้วยกัน
● การออกแบบกลไกที่รับรู้การควบคุมเพื่อการตอบสนองแบบไดนามิกที่ดีขึ้น
● การตรวจสอบความทนทานตามมาตรฐาน IEC 60068 เพื่อความน่าเชื่อถือทางอุตสาหกรรม
ND-A5216-10 ไม่ใช่ส่วนประกอบแบบสแตนด์อโลน แต่เป็นส่วนหนึ่งของระบบการเคลื่อนไหวที่ได้รับการปรับปรุงร่วมกันซึ่งออกแบบมาสำหรับสภาพแวดล้อมการผลิตอัจฉริยะ
▌ส่วนที่ 6: บริบทของตลาด
ตลาดตัวกระตุ้นหุ่นยนต์กำลังขยายตัวอย่างรวดเร็วเนื่องจาก:
● ระบบอัตโนมัติอุตสาหกรรม 4.0 และระบบการผลิตที่ยืดหยุ่น
● การเติบโตของหุ่นยนต์ร่วมปฏิบัติงานในสภาพแวดล้อมของมนุษย์ที่ใช้ร่วมกัน
● การย่อขนาดของเครื่องจักรอุตสาหกรรม
● ความต้องการความหนาแน่นของแรงบิดที่สูงขึ้นในพื้นที่ขนาดเล็ก
ในบริบทนี้ แอคชูเอเตอร์แบบรวม เช่น ND-A5216-10 ช่วยลดความซับซ้อนของระบบโดยการรวมมอเตอร์ กระปุกเกียร์ และการตรวจจับไว้ในสถาปัตยกรรมเดียว เร่งวงจรการพัฒนา OEM และปรับปรุงความน่าเชื่อถือ
❓ คำถามที่พบบ่อย
คำถามที่ 1: ND-A5216-10 แตกต่างจากระบบมอเตอร์ + กระปุกเกียร์อย่างไร
โดยผสานรวมมอเตอร์ กระปุกเกียร์ดาวเคราะห์ และตัวเข้ารหัสคู่เข้ากับระบบที่ออกแบบร่วมกัน ขจัดข้อผิดพลาดในการจัดตำแหน่งและปรับปรุงความแม่นยำของวงปิด
คำถามที่ 2: ประสิทธิภาพฟันเฟืองของมันคืออะไร?
ต่ำกว่า 3 อาร์คนาที ซึ่งสอดคล้องกับข้อผิดพลาดในการวางตำแหน่งต่ำกว่ามิลลิเมตรบนแขนหุ่นยนต์แบบยาว
คำถามที่ 3: ทำไมต้องใช้ตัวเข้ารหัสคู่
โดยกำจัดข้อผิดพลาดในการอนุมานโดยการวัดตำแหน่งเอาต์พุตโดยตรง ปรับปรุงความแม่นยำของวิถี และเปิดใช้งานการบำรุงรักษาเชิงคาดการณ์
คำถามที่ 4: รองรับการควบคุมแรงบิดหรือไม่
ใช่. แอคทูเอเตอร์รองรับแรงบิด ความเร็ว และการควบคุมตำแหน่งแบบเรียลไทม์พร้อมการตอบสนองแบนด์วิธสูงเหมาะสำหรับการใช้งานที่ไวต่อแรง
คำถามที่ 5: เหมาะสำหรับโคบอทหรือไม่
ใช่. เสียงรบกวนต่ำ การควบคุมแรงบิดตามมาตรฐาน และการตอบสนองที่รวดเร็ว ทำให้เหมาะสำหรับสภาพแวดล้อมการทำงานร่วมกันระหว่างมนุษย์และหุ่นยนต์
คำถามที่ 6: ระบบลอจิสติกส์มีข้อดีอะไรบ้าง?
การควบคุมแรงบิดแบบปรับได้ทำให้สามารถจัดการน้ำหนักบรรทุกแบบผสมที่มีมวลและความเปราะบางที่แตกต่างกันได้โดยไม่ต้องเปลี่ยนฮาร์ดแวร์
คำถามที่ 7: iHF Group ให้การสนับสนุนอะไรบ้าง
โมเดล CAD ข้อมูลความเร็วแรงบิด การวิเคราะห์เชิงความร้อน และการสนับสนุนทางวิศวกรรมระดับแอปพลิเคชันสำหรับการบูรณาการ OEM

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar ขอใบเสนอราคา
ขอใบเสนอราคา